|
Exploring BeagleBone
V1.0
|


All Data Structures Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
Exploring BeagleBone
V1.0
|
#include <stdlib.h>#include <unistd.h>#include <fcntl.h>#include <linux/i2c.h>#include <linux/i2c-dev.h>#include <sys/ioctl.h>#include <stropts.h>#include <stdio.h>#include "ITG3200.h"#include <iostream>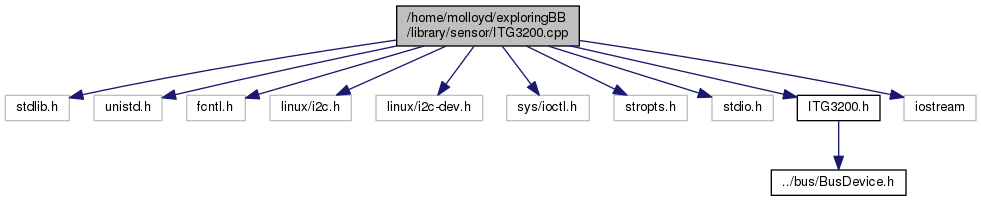
Namespaces | |
| exploringBB | |
Macros | |
| #define | WHOAMI 0x00 |
| #define | GYRO_X_MSB 0x1D |
| #define | GYRO_X_LSB 0x1E |
| #define | GYRO_Y_MSB 0x1F |
| #define | GYRO_Y_LSB 0x20 |
| #define | GYRO_Z_MSB 0x21 |
| #define | GYRO_Z_LSB 0x22 |
| #define | TEMP_MSB 0x1B |
| #define | TEMP_LSB 0x1C |
| #define | INT_CFG 0x17 |
| #define | INT_STATUS 0x1A |
| #define | PWR_MGM 0x3E |
| #define | SMPLRT_DIV 0x15 |
| #define | DLPF_FS 0x16 |
| #define | MAX_BUS 64 |
| #define DLPF_FS 0x16 |
| #define GYRO_X_LSB 0x1E |
| #define GYRO_X_MSB 0x1D |
| #define GYRO_Y_LSB 0x20 |
| #define GYRO_Y_MSB 0x1F |
| #define GYRO_Z_LSB 0x22 |
| #define GYRO_Z_MSB 0x21 |
| #define INT_CFG 0x17 |
| #define INT_STATUS 0x1A |
| #define MAX_BUS 64 |
| #define PWR_MGM 0x3E |
| #define SMPLRT_DIV 0x15 |
| #define TEMP_LSB 0x1C |
| #define TEMP_MSB 0x1B |
| #define WHOAMI 0x00 |
 1.8.8
1.8.8