|
Exploring BeagleBone
V1.0
|


All Data Structures Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
Exploring BeagleBone
V1.0
|
#include <iostream>#include "gpio/GPIO.h"#include "gpio/PWM.h"#include "sensor/ADXL345.h"#include <unistd.h>#include <pthread.h>#include "bus/I2CDevice.h"#include "bus/SPIDevice.h"#include "display/SevenSegmentDisplay.h"#include "display/LCDCharacterDisplay.h"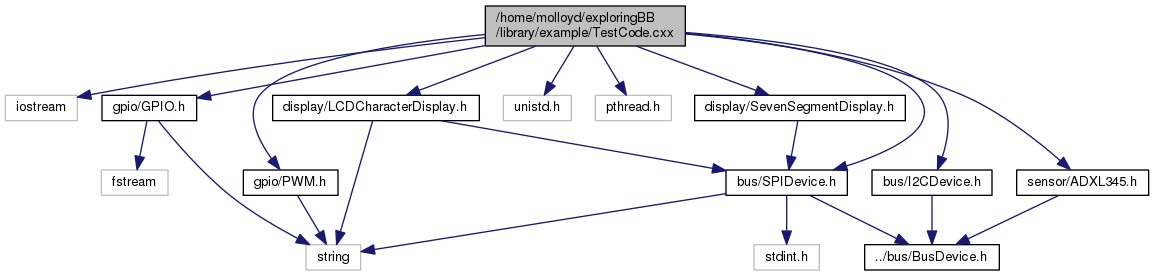
Functions | |
| int | callbackFunction (int var) |
| int | main () |
| int callbackFunction | ( | int | var | ) |
| int main | ( | ) |
 1.8.8
1.8.8